 Llenar el hueco 2 Llenar el hueco 2
1. Con el bus CAN, la urgencia del determina la secuencia, no el significado del participante.
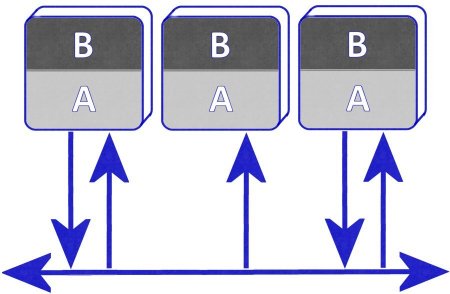
2. BÃsicamente, solo las se comunican a travÕs del bus CAN (imagen de arriba).
3. En el caso de un sistema de iluminaciµn, la tecnologÚa de bus CAN comprobarÚa la funcionalidad en cada .
4. Cada mensaje en el bus CAN debe contener al menos una ademÃs de los datos.
5. Ocho microsegundos es igual a segundos.
6. Los diferentes voltajes de la lÚnea de datos se logran conectando
pequeþas o grandes.
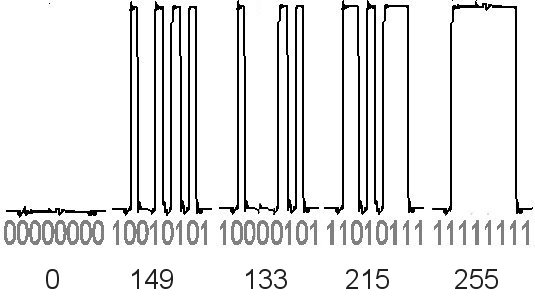
7. La cifra mÃs alto que se puede transmitir en el sistema que se muestra arriba es
.
8. Antes de que se envÚe el mensaje real, se envÚan algunos cambiantes para la sincronizaciµn.
9. Los voltajes entre
y se consideran como seþales ambiguas.
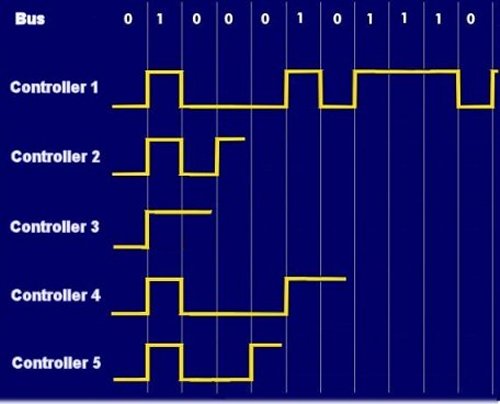
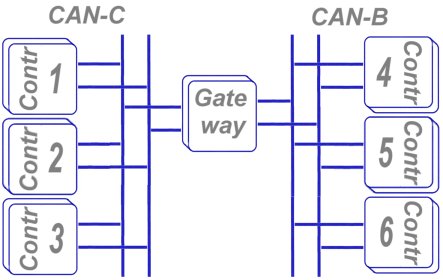
10. AquÚ prevaleciµ el controlador 1 porque los prevalecen sobre los .
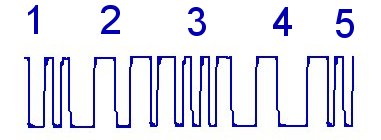
11. Cada participante del bus CAN tambiÕn lee su propio .
12. Si un mensaje no se puede entregar debido a otro mÃs importante, el suscriptor vuelve a intentarlo en
segundos.
13. El nºmero 3 identifica el .
14. Este diseþo se denomina un bus de .
15. Entonces tambiÕn es posible aquÚ una mÃs alta.
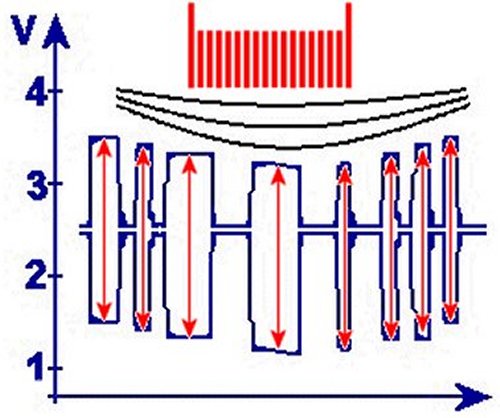
16. La lÚnea con el voltaje mÃs bajo se designa con la forma abreviada
y la lÚnea con el voltaje mÃs alto con .
17. Se evalºa principalmente la entre los dos voltajes.
18. Los bits transmitidos por segundo se denominan .
19. 4800 rpm corresponden a /s.
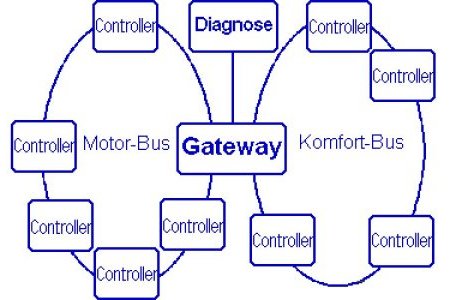
20. Una conecta los buses entre sÚ.
|