 Transmission - Introduction 1 Transmission - Introduction 1

One thinks, Vehicles with electric motors have no gearbox, and makes a dash for the data behind 'gearbox'. This is of course not correct, because the electric motor in particular, with its preferred speeds, does not fit the
needs of a motor vehicle at all. As a rule, he even needs two sets of gears, each with a small driving and a large driven gear.

A gearbox with 'only' one gear must of course still be called a gearbox. Otherwise it would be a 'change speed' or 'manual' gearbox. If this is only shifted by hand, it is a 'manual gearbox'. Also the axle drive with e.g. bevel
and ring gear is a transmission, which has the task to adapt torque and speed to the requirements.
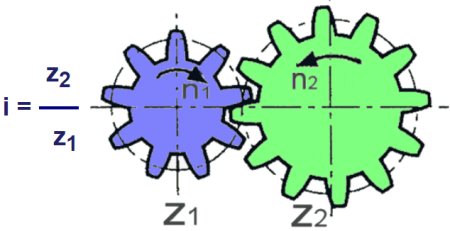
These would then be gearboxes with a constant ratio of output to input speed, the transmission ratio i. Today's transmissions in motor vehicles are mostly positive-locking, in the past there were also friction-locking
transmissions. However, one would have to assign most belt drives to the topic of 'gears', as long as there is an environmental translation. They also work force-locked.
And even that would not be correct, because there are also (manual) transmissions where one gear has a transmission ratio of 1 (picture above), so practically no transmission takes place. Such gears are also called
'direct gear'. Transmission ratios can also be achieved by so-called 'hydro' or 'fluid' transmissions. Hydrostatic transmissions work with high pressure and low flow velocity, hydrodynamic ones with lower pressure and
higher flow velocity.

Hydrostatic drives can be found, for example, on excavators (picture above), whose Diesel (-electric) pressure generator is mounted on a rotating frame and which still has to drive the wheels or chains. Good examples of
hydrodynamics in motor vehicles are the hydraulic clutch and the torque converter. With the latter, for example, its function as a transmission can also be seen from the fact that it can replace a gear of the following
transmission.
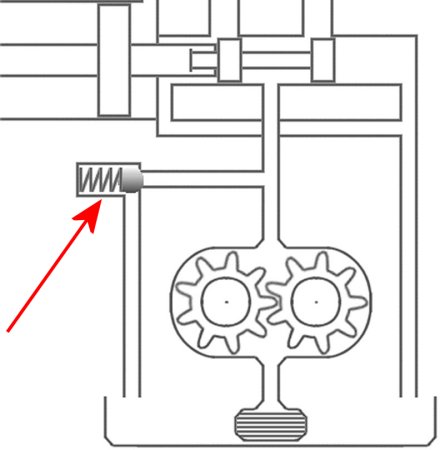
This type of gearbox is often equipped with overload protection. With torque converters, the temperature can be recorded via sensors and the drive motor can be instructed to reduce its torque accordingly. In the case of
hydrostatics even an overload valve (picture above) is possible, which absorbs pressure peaks. With hydraulic drives, variable and also particularly large transmission ratios are possible.

In contrast to wheel gears, the transmission function of hydrostatically effective gears is hardly recognizable, at least from the outside (see picture above), because it is often only realized by means of cylinder or piston
cross-sections that are tailored to one another. With hydrodynamic transmissions, one would have to measure the individual speeds or torques in order to be able to recognize transmission ratios.
Perhaps the transmissions of electric motors, in contrast to those of combustion engines, are denied the right to exist because they are hardly recognizable as such. One reason for this could be the clutch, which always
separates the engine and the transmission in a combustion engine. The electric motor does not need such a clutch, which makes its design together with the input gearbox much more compact.
In vehicle drives, the gearboxes are very lightly loaded in terms of torque, if you compare this with industrial loads. The shredder or even the press, which turns a car body into a reasonably handy package in a relatively
short time, may be close to the car. You can also see from the deceleration of the presumably quite fast movement of the press drive that large forces are generated here.
One speaks of 50,000 to 100,000 Nm torque. Transferred to the motor vehicle, this means that a very good 500 Nm may be quadrupled for the passenger car and 1,600 Nm for the truck. Even if this factor becomes even
higher at particularly slow speeds, it does not come close to the above-mentioned ones.
However, when we look at the transmissions, we must not forget the many little helpers that enable the electric motors to open the tailgate, close the sliding door, fold the outside mirror or adjust the seat, for example. They
are grouped together under the term 'servo gears', designed for high gear ratios rather than high torque.
Especially recently, the modular system of gearboxes has become apparent. Automatic transmissions, mostly manufactured by suppliers, are best suited for this purpose. Since an electric drive is still possible there,
hybrid solutions alone or combined with torque converters and at the same time with different numbers of gears and, if necessary, all this in one and the same housing are possible.
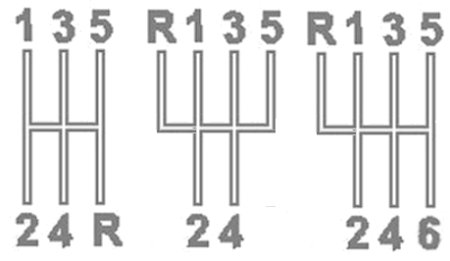
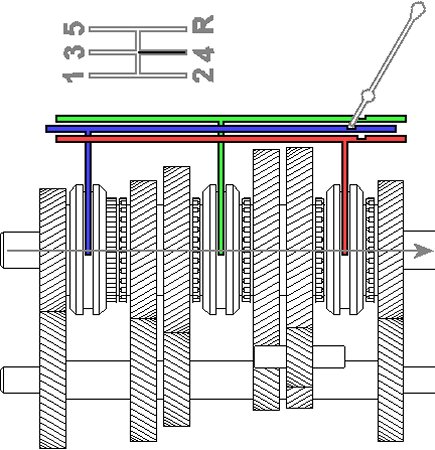
It is also possible that a particular type of gearbox is oversized for the weaker engine, simply because it was designed for a certain range of engines. The shifting schemes of manual transmissions have also long since
become standardized. Gone are the days when you had to study the shifting scheme on the gear knob before a possible reverse drive.
Manual gearboxes can basically be distinguished according to the position of the input and output shaft. If the former appears to go straight through, we speak of a 'coaxial gear', the output shaft is offset by one gear wheel
diameter, from a 'parallel shaft gear'. And if both shafts form an angle of 90¯, this is made possible by an angular gear. Of course, a coaxial gear, unless equipped with planetary gear sets, is a parallel shaft gear inside it.
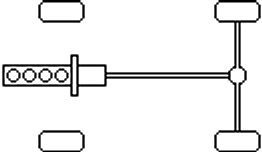
In motor vehicles, these types of construction can be assigned very well. First of all there is the angular gear on the drive axle, but only if the engine is arranged longitudinally. A coaxial gearbox is the rule for the formation of
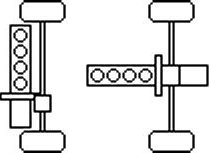
front engine with rear wheel drive, still called 'standard drive' (picture above). And parallel shafts exist in all other arrangements, no matter whether front- or rear wheel drive, longitudinal or transverse, the main thing is that
the engine is followed first by the axle drive and then by the gear box (picture below).
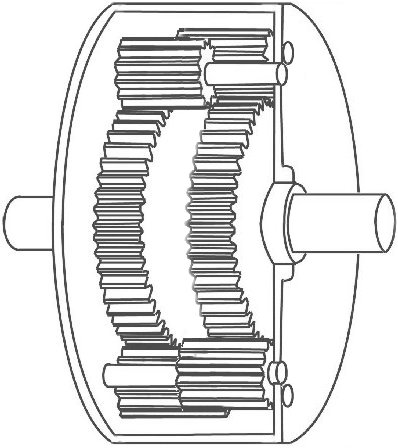
Traditional and very modern differential gears are a good mirror for bevel and spur gears (picture below), the latter with a significant space saving. The fact that spur gears can also carry their gearing to the inside can be
seen in planetary gear sets. There they are called ring gears and can also span or connect two planetary gears. The conventional starter is a good example of how space-saving such a planetary gear set can be.
This is also attempted with parallel shaft gears. Because, as already mentioned, the e-drive often needs two gear pairs for transmission, these are not placed side by side, but the second pair is directed back to the
original shaft. To do this, the armature shaft of the motor must be hollow and the torque must be passed through it to the other side.
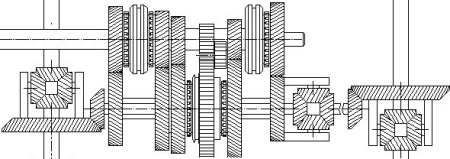
Probably one could also write a complete chapter or a book about hollow shafts. They gained special significance in the automotive sector when Audi decided to implement the so-called quattro drive (see picture above). In
the first stage, the front and rear axles were rigidly connected. Only at the second attempt, through a shaft in the output shaft, was it possible to install a center differential.
|