
|
 Einleitung Einleitung
| So sehen CAN-Bus-Signale im Mikroskop aus. |
Wir werden sehen, dass Bussysteme nicht nur nach der internen Geschwindigkeit beurteilt werden können. Das ist wie bei einem schnellen Rechner zuhause, der einem bisweilen seltsam durch Software gebremst
vorkommt. Sicherlich spielt es eine Rolle, wenn der LIN-Bus nur maximal 25 kBit/s und MOST bis zu 10 Mbit/s übertragen können, was übrigens das Vierhundertfache ist.
Vielmehr wird sich als wichtig herausstellen, wie lange es dauert, bis eine Botschaft (Nachricht) übertragen ist. Dabei werden uns nicht nur die hoch priorisierten wie z.B. solche für sicherheitsrelevante
Systeme interessieren, sondern auch die wesentlich weniger wichtigen, besonders die Frage, ob sie denn in einem unter Stress gesetzten System überhaupt noch jemals ankommen.
Es wird um Datenmengen gehen, die, wie schon gezeigt, von einem MOST-Bus sehr gut weitergeleitet werden können, aber gleichzeitig auch um die Sicherheit. Da wird bei MOST weniger aufwändig geprüft,
weil man bei einem Film kaum merkt, wenn ein Bit falsch übertragen wurde. Das ist natürlich bei ABS etwas völlig anderes. Und dann wird man diskutieren müssen, ob man nicht Letztgenannten besonders
priorisierte Plätze anbieten und die anderen sich den Rest teilen sollten.
Auch der Kabelaufwand ist wichtig, wenn es denn durch das ganze Auto geht. Da ist oft vom Zweidraht-CAN-Bus die Rede und nur selten wird der mit einem Draht erwähnt. Natürlich gehört hier eine
Masseverbindung dazu, die man im Prinzip nicht über die Karosserie führen kann. Zu empfindlich das System gegenüber größeren Übergangswiderständen.
Und dann der Zusammenschluss der einzelnen Steuergeräte. Wenn jedes z.B. mit zwei Drähten ankommt, kann man die sehr wohl verschieden miteinander verknüpfen. Beliebte Bereiche für systematische
Erklärungen, die Sie hier im Buch ein wenig später finden. Und auch sind es nicht immer nur Kupferkabel, die man vorfindet, sondern auch Lichtwellenleiter mit ihren Besonderheiten beim Verlegen und
Reparieren. Aber auch hier ist immer ein Kupferkabel dabei.
Sind die korrekt, die Vergleiche mit den Menschen in einer Konferenz? Nein, beim CAN-Bus darf z.B. nicht jeder ausreden. Im Gegenteil, sobald klar wird, dass er gegenüber einem/r anderen Teilnehmer/in eine
Nachricht von geringerer Priorität im Gepäck hat, wird er jäh unterbrochen, was sage ich, er unterbricht sich selbst. Sie merken schon, das Modell ist zwar perfekt, aber ungeeignet für jede Talkshow. Es ist halt
bei den Bussystemen alles vorherbestimmt.
Mit der menschlichen Sprache wohl kaum zu vergleichen, wohl eher mit Textblöcken beim Bearbeiten schriftlicher Anfragen. Alle Botschaften liegen bereit, nichts dran zu ändern, nur die ermittelten Werte bei
Abfragen. Befehle, etwas zu tun, müssen vorher festgelegt werden, damit Empfänger das genau so machen, wie Sender es sich vorstellen. Nein, für Kreativität ist da noch weniger Raum als bei einer geführten
Fehlersuche.
Gerade im Moment merkt man bei den Software-Übertragungen vornehmlich auf Elektroautos, dass es gar nicht so einfach ist, z.B. ein komplettes Update 'over the air' durchzuführen. Wem schickt
man das eigentlich, wenn es, wie beim CAN-Bus, keine Master gibt? Muss man da erst noch das ganze System umbauen, sich der PC-Technik annähern? Solange nur Busse dominieren, muss man sich im
Prinzip von einem zum anderen durchhangeln.
Da spielen die Verbindungsglieder eine große Rolle. Und natürlich muss es irgendeine Art Basis geben, immer vorhanden sein, um den ganzen Austauschprozess zu händeln. Wir werden sehen, dass man
solche Probleme schon einmal beim Aufbau verschiedener Bussysteme hatte, die ja auch z.B. von einem Werkstattcomputer auslesbar sein mussten. Heute sind die Hürden weitestgehend überwunden, Hürden,
eher vom Hersteller bewusst eingebaut.
Auch die Dauer von kompletten Updates hat man unterschätzt. Beim Update in der Werkstatt geht bisweilen ein kompletter Werktag drauf. Da bedarf es Sicherungen gegen Funklöcher, damit danach an der
richtigen Stelle wieder angesetzt werden kann. Überhaupt die Sicherheit. Ist man schon im System, wenn man Zugriff auf die Datenleitung eines Bussystems hat? Ja, so ziemlich, bis auf den Lin-Bus vielleicht.
Da gibt es Sklaven mit sehr beschränkten Rechten.
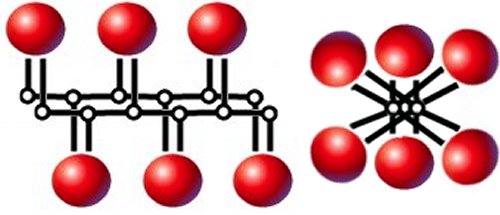
Zum Schluss noch eine kleine Aufgabe: Die Schaltung auf dem Bild links wird gemeinhin als 'Bus' bzw. lineare Vernetzung bezeichnet, die rechte als Stern-Topologie. Sie finden sie in vielen einschlägigen
Beschreibungen.
Wenn man einmal scharf nachdenkt, ist da überhaupt ein schaltungstechnscher Unterschied, außer dass die Leitungen links etwas länger sind?
|
|